评估预期控制策略以应对人类步行计算机模拟中的逐步下降扰动的能力
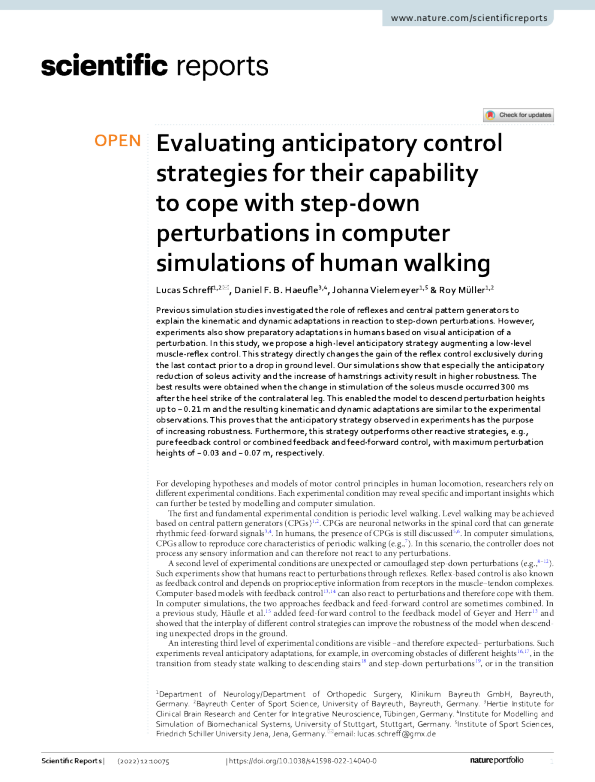
科学报告|(2022) 12:10075| https://doi.org/10.1038/s41598-022-14040-01 打开评估预期控制在计算机模拟人类行走中应对降级扰动的能力的策略卢卡斯·施雷夫1,2, Daniel F. B. Haeufle3,4, Johanna Vielemeyer1,5 & Roy Müller1,2以前的模拟研究调查了反射和中央模式生成器的作用,以解释运动学和动态适应对降压扰动的反应。然而,实验还显示了人类基于对扰动的视觉预期的准备性适应。在这项研究中,我们提出了一种增强低水平肌肉反射控制的高级预期策略。该策略仅在地面下降之前的最后一次接触期间直接改变反射控制的增益。我们的模拟表明,特别是比目鱼肌活动的预期减少和腘绳肌活动的增加导致更高的稳健性。当对侧腿的足跟撞击后 300 ms 发生比目鱼肌刺激的变化时,获得了最好的结果。这使模型能够将扰动高度降低到 - 0.21 m,并且由此产生的运动学和动态适应类似于实验观察。这证明了实验中观察到的预期策略是有目的的的增加稳健性。此外,该策略优于其他反应策略,例如纯反馈控制或组合反馈和前馈控制,最大扰动高度分别为 - 0.03 和 - 0.07 m。为了开发人类运动中运动控制原理的假设和模型,研究人员依赖于不同的实验条件。每个实验条件都可能揭示具体和重要的见解,可以通过建模和计算机模拟进一步测试。第一个也是基本的实验条件是周期性水平行走。可以基于中央模式生成器 (CPG) 实现水平行走1. CPG 是脊髓中的神经元网络,可以产生有节奏的前馈信号3.在人类中,CPG 的存在仍在讨论中5.在计算机模拟中,CPG 允许重现周期性行走的核心特征(例如,7)。在这种情况下,控制器不处理任何感官信息,因此不能对任何扰动做出反应。第二级实验条件是意想不到的或伪装的降压扰动(例如,8)。这样的实验表明,人类通过反射对扰动做出反应。基于反射的控制也称为反馈控制,它依赖于来自肌肉-肌腱复合体中受体的本体感受信息。具有反馈控制的基于计算机的模型13也可以对扰动做出反应,从而应对它们。在计算机模拟中,有时将反馈和前馈控制这两种方法结合起来。在之前的一项研究中,Häufle 等人。15在 Geyer 和 Herr 的反馈模型中添加前馈控制13并表明不同控制策略的相互作用可以提高模型在地面意外下降时的鲁棒性。一个有趣的第三级实验条件是可见的——因此是预期的——扰动。这样的实验揭示了预期的适应,例如,克服不同高度的障碍16, 在从稳态步行到下楼梯的过渡中18和降压扰动19, 或在过渡中1德国拜罗伊特 Klinikum Bayreuth GmbH 神经内科/骨外科。 2拜罗伊特大学拜罗伊特运动科学中心,德国拜罗伊特。 3Hertie 临床大脑研究所和综合神经科学中心,德国蒂宾根。 4德国斯图加特大学生物力学系统建模与仿真研究所。 5德国耶拿弗里德里希席勒大学体育科学研究所。电子邮件:lucas.schreff@gmx.de 科学报告|(2022) 12:10075 |https://doi.org/10.1038/s41598-022-14040-02图1。该模型以扰动高度 h 下降到地面上。对侧腿标记为绿色,同侧腿标记为蓝色。在预备接触中,五块肌肉、腘绳肌 (HAM)、股肌 (VAS)、腓肠肌 (GAS)、比目鱼肌 (SOL) 和胫骨前肌 (TA) 示例性地显示在对侧腿中。 BAB 和 BPB 在前后方向上限制了支撑的基础。用于根据 Hof 等人的原理计算稳定边际 (S)。22另外还需要 CoM 的水平分量 (PCoM)、CoM 和踝关节之间的距离 (l) 以及 CoM 的速度 (vCoM)。 XCoM 表示外推的质心。从不同的地面刚度20.此外,Müller 等人。19研究了受试者在最后一次地面接触期间在地面下降 - 0.10 和 - 0.20 m 的可见水滴之前所做的肌肉适应。由于肌肉活动的改变,踝关节和膝关节更加弯曲,从而降低了身体的重心(CoM)。这可能是通过改变跖屈肌的肌肉活动来实现的腓肠肌内侧肌 (GAS) 和比目鱼肌 (SOL)。在另一条(同侧)腿的脚跟撞击发生在受扰动的地面高度之前的最后 200 毫秒内,根据扰动高度,两块肌肉的活动显着降低19.在计算机模拟中的质心动量水平上已经证实了在逐步降低扰动中稳定的预期策略的好处21.我们研究的目的是调查预期适应对肌肉控制水平的潜在好处。为此,我们扩展了 Geyer 和 Herr 的步行模型13包括预期控制策略。预期控制策略仅在降压扰动之前的最后(准备)接触期间采用(图 1)。在这一步中,我们只改变原始模型的反射循环中的突触增益13在两个不同的时间(“早期预期”:在整个准备接触 C0 期间,“晚期预期”:脚跟撞击后 300 毫秒)。性能是在降压扰动中评估的。我们的假设是,在扰动之前的步骤中,实验观察到的跖屈肌活动减少19 将允许模型降低更大的扰动高度。此外,由于在所有测量的对侧腿部肌肉(股内侧肌、股二头肌、胫骨前肌、腓肠肌内侧肌、比目鱼肌19)我们还单独研究模型的每个肌肉群的肌肉适应性(类似于 Häufle 等人。15)。此外,我们追求的目标是寻找其他不减少跖屈肌活动的预期策略。这种策略可能与跖屈肌痉挛患者或老年人有关。我们将模拟结果与实验数据(CoM 轨迹、地面反作用力、腿部关节运动学和肌肉活动)进行比较。方法基础:人类行走的肌肉反射模型。我们研究了预期策略在人类行走的计算机模拟中的潜在好处。我们研究中使用的模型是基于 Geyer 和 Herr 的肌肉反射模型13,它准确地预测了水平(未受干扰)人类行走的运动学和动力学。该模型考虑了一个躯干和两条由大腿、小腿和足部组成的分段腿(图 1)。腿和躯干的刚体通过铰链关节连接,由14个希尔型肌腱单元驱动。步行仅由基于反射的输入产生,主要来自本体感受肌肉长度和力反馈。腘绳肌、髋屈肌和臀肌的肌肉刺激还取决于躯干的前倾角和速度。反馈信号认为神经元时间延迟 ΔP 为 5-20 ms,a 科学报告|(2022) 12:10075 |https://doi.org/10.1038/s41598-022-14040-03图 2。框图(一个) Geyer 和 Herr 的原始基于反射的步行模型13 和 (b) 应用预期策略的扩展。在这两个图中,来自肌肉-肌腱单元 (MTU) 的反馈信号 P(t) 是时间延迟的 ΔP、增益 (G),并添加到恒定刺激偏差 (u0)。产生的刺激信号 (ut) 通过运动神经元 (aMN) 传回肌肉,并且只能采用 1 到 0 之间的值。扩展的特点是计算左腿的地面接触。在准备步骤C0,反射增益G被切换到预期增益G0。如果 Δta = 0,则预期增益从 C0 的脚跟打击(早期预期)激活,而后期预期通过Δta = 0.3 秒。经 Geyer 和 Herr 许可采用13突触增益 G 和小的恒定刺激偏差 u0(图 2a)。有关如何对反射进行建模的详细说明,请参见13.新颖的扩展:降压扰动的预期控制。先前的实验表明,在可见的降压扰动之前的最后一个站立阶段,肌肉活动已经发生了变化19.我们将最后一个站立阶段称为“准备接触”(图 1 中的 C0)。穆勒等人。19 发现在准备接触期间,预期策略显着降低了跖屈肌(即腓肠肌内侧肌和比目鱼肌)的活动。在我们的模型扩展中,预期策略是通过仅在准备接触期间仅增加或减少对侧腿中一块肌肉的反馈增益来实施的(图 2b)。我们研究了腓肠肌 (GAS) 和比目鱼肌 (SOL) 以及腘绳肌 (HAM)、股肌 (VAS) 和胫骨前肌 (TA) 中的预期反馈增益适应。对于除腘绳肌以外的所有肌肉,增益调整会改变它们的本体感受力反馈水平,从而改变它们的刺激。我们想要适应腘绳肌的反馈信号取决于前倾角、躯干速度和相应腿上的体重。Müller 等人的实验数据。19表明足底屈肌的肌肉适应不会在预备接触的足跟触地后立即发生,而只会在站立阶段的进一步过程中发生。这一观察也是在受试者为下楼梯做准备的过渡步骤期间进行的18.为了测试这些晚期适应与脚后跟触地后的立即适应相比是否有好处,我们研究了两种不同的情况,我们称之为“晚期预期”和“早期预期”。为了实现早期预期,我们在整个预备接触期间(从脚跟着地到脚趾离开)进行了增益调整。对于后期预期,增益适应是从脚跟触地(大约中间)后 300 毫秒到脚趾离地。在准备接触之前和之后,模型使用反射增益的默认值。盖尔和赫尔13启发式地调整这些反射增益以进行水平行走,以生成类似于人类关节运动学、地面反作用力和肌肉活动模式的健壮行走模式。这些参数没有针对任何特定的成本函数进行系统优化。模型分析。为了研究模型补偿降压扰动的能力,我们进行了网格搜索,改变了扰动高度 h 和预期增益 G0。对每块肌肉的预期增益 G0 进行修改,直到反馈信号在准备步骤期间的任何时间点变得小于 0.05 或超过 0.95(对应于几乎停用或几乎完全激活的肌肉)。通过移动接地参考高度来实现降压扰动是的0由扰动高度 h:是的0=0米+H(1)模拟在扰动前 10 秒开始,允许模型以 18 个常规未扰动步骤达到稳态行走模式。模拟又持续了十秒钟。我们定义,当模型在模拟结束时(20 秒)仍在行走时,试验是成功的。通过这个时间跨度,我们确保模型在扰动后要么下降,要么返回步行模式。为了评估模型在障碍物后的动态稳定性,我们计算了前后方向的稳定性边际(S)22.稳定边际 科学报告|(2022) 12:10075 |https://doi.org/10.1038/s41598-022-14040-04小号=乙AB−X通讯(2)是外推质心 (XCoM) 和支撑底座前边界 (BAB) 之间的水平距离,在我们的例子中是模型前脚到地面的水平投影。 XCoM 使用 CoM 的水平分量 (PCoM)、CoM 的水平速度 (vCoM)、重力加速度 (g) 以及 CoM 与踝关节之间的距离 (l) 计算(图1).v通讯录X通讯录=磷通讯录+ G(3)l我们确定了预备接触 (C0) 和随后的两个接触 (C1、C2) 在地面下降后的足跟触地稳定性裕度。在稳态行走中,脚跟在脚跟撞击时的速度约为 1.3 m/s,这会导致地面接触模型中的变形而不是滑动。在一些更高的扰动步骤中,脚跟撞击速度更高,并且脚被向前推在地面上滑动。由于这人为地增加了足跟撞击后的支撑基础,因此我们仅在足跟速度低于 1.5 m/s 时计算稳定性余量以避免这些伪影。在预备接触的足跟触地时,稳定裕度 SC0 约为 0.005 m。理论上,正值表示稳定的身体配置22.为了能够将 SC1 和 SC2 组合成一个值,我们计算“稳定性边际的偏移”。该参数由 SC1 和 SC2 之间的平均偏差和预备接触中的稳定边际 (S0) 计算得出。∆小号=SC1−SC0|SC2−SC0|2(4)如果扰动后两步的稳定性边际(SC1和SC2) 将与预备接触的足跟触地时的稳定裕度完全相同SC0.比较两种行走模式的 ΔS 表明,较小的情况∆小号在稳定性边际方面显示出与水平行走模式的偏差较小,并且可以解释为“更稳定”。该模型在 Matlab® Simulink® R2021a 中实现,并使用 ode15s 求解器执行仿真(最大步长为 10 ms,相对和绝对误差容限为 10–3和 10–4, 分别)。先前进行的步行实验的数据准备。为了将模拟结果与实验进行比较,我们分析了先前执行和发表的步行实验的数据19.八名受试者(两名女性,六名男性,平均 ± 标准差,年龄:26.8 ± 5.3 岁,体重:70.0 ± 10.6 kg,身高:180.9 ± 7.6 cm)被指示行走(平均水平稳态 CoM 速度 1.22 m/s)沿着一条 8 m 的走道,中间有两个连续的测力台,到达对侧的第一个测力台和同侧腿的第二个测力台。第二次接触时的测力台高度可调,走道的后续部分也是如此。所有受试者都给出了书面知情同意书。对于预期的降级,轨道降低了− 距第二测力台位置 0.1 m。在身体两侧的第五趾尖




